1. Komponen [kembali]

Gambar 1. LED

Gambar 2. Bentuk Hardware LED

Gambar 3. Arduino Master

Gambar 4. Arduino Slave

Gambar 5. Button

2. Rangkaian Simulasi [kembali]

3. Flowchart [kembali]
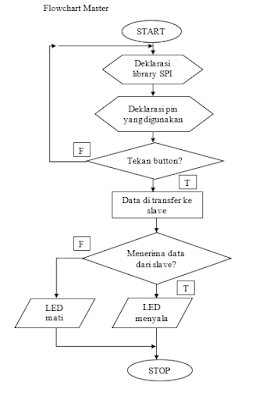
Gambar 8. Flowchart Arduino Master

Gambar 9. Flowchart Arduino Slave
4. Listing Program [kembali]
A. Master
#include <SPI.h> //Deklarasi library SPI
#define button 2
void setup (void) {
pinMode(button, INPUT_PULLUP);
Serial.begin(115200 ); //Set baud rate 115200
digitalWrite(SS, HIGH);
// disable Slave Select
SPI.begin ();
SPI.setClockDivider(SPI_CLOCK_DIV8); //divide the clock by 8
}
void loop (void) {
char c;
int nilai=digitalRead(button);
if(nilai==0){
digitalWrite(SS, LOW); //enable Slave Select
// send test string
for (const char * p = "Hello, world!\r" ; c = *p; p++)
{
SPI.transfer (c);
Serial.print(c);
}
digitalWrite(SS, HIGH); // disable Slave Select
delay(2000);
}
}
#define button 2
void setup (void) {
pinMode(button, INPUT_PULLUP);
Serial.begin(115200 ); //Set baud rate 115200
digitalWrite(SS, HIGH);
// disable Slave Select
SPI.begin ();
SPI.setClockDivider(SPI_CLOCK_DIV8); //divide the clock by 8
}
void loop (void) {
char c;
int nilai=digitalRead(button);
if(nilai==0){
digitalWrite(SS, LOW); //enable Slave Select
// send test string
for (const char * p = "Hello, world!\r" ; c = *p; p++)
{
SPI.transfer (c);
Serial.print(c);
}
digitalWrite(SS, HIGH); // disable Slave Select
delay(2000);
}
}
B. Slave
#include <SPI.h>
#define led 2
char buff [50];
volatile byte indx;
volatile boolean process;
void setup (void) {
Serial.begin (115200);
pinMode(led, OUTPUT); // have to send on master in so it set as output
SPCR |= _BV(SPE); // turn on SPI in slave mode
indx = 0; // buffer empty
process = false;
SPI.attachInterrupt(); // turn on interrupt
}
ISR (SPI_STC_vect) // SPI interrupt routine
{
byte c = SPDR; // read byte from SPI Data Register
if (indx < sizeof buff) {
buff [indx++] = c; // save data in the next index in the array buff
if (c == '\r') //check for the end of the word
process = true;
}
}
void loop (void) {
if (process) {
digitalWrite(led, HIGH);
process = false; //reset the process
Serial.println (buff); //print the array on serial monitor
indx = 0; //reset button to zero
delay(1000);
}
else
{
digitalWrite(led, LOW);
}
}
#define led 2
char buff [50];
volatile byte indx;
volatile boolean process;
void setup (void) {
Serial.begin (115200);
pinMode(led, OUTPUT); // have to send on master in so it set as output
SPCR |= _BV(SPE); // turn on SPI in slave mode
indx = 0; // buffer empty
process = false;
SPI.attachInterrupt(); // turn on interrupt
}
ISR (SPI_STC_vect) // SPI interrupt routine
{
byte c = SPDR; // read byte from SPI Data Register
if (indx < sizeof buff) {
buff [indx++] = c; // save data in the next index in the array buff
if (c == '\r') //check for the end of the word
process = true;
}
}
void loop (void) {
if (process) {
digitalWrite(led, HIGH);
process = false; //reset the process
Serial.println (buff); //print the array on serial monitor
indx = 0; //reset button to zero
delay(1000);
}
else
{
digitalWrite(led, LOW);
}
}
5. Video Simulasi [kembali]
6. Analisa [kembali]
Soal :
1. Bisakah pada SPI menggunakan lebih dari 1 master? Jelaskan beserta alasannya!
2. Jelaskan pengaruh input pullup dan pulldown pada rangkaian !
3. Jelaskan prinsip kerja SPI pada rangkaian?
Jawab :
1. Tidak Bisa, karena master disini berfungsi sebagai pengontrol komunikasi serial sinkron pada SPI dimana dapat mengirim atau menerima data.
2. Berdasarkan percobaan yang telah dilakukan.Dapat dilihat ketika kondisi button pullup maka berlogika low atau bernilai 0. Maka yang diterima slave yaitu berlogika hight, karena berlogika hight LED akan hidup.Sedangkan pada kondisi button pulldown akan berlogika hight atau bernilai 1. Maka yang diterima slave berlogika slow, karena berlogika slow maka LED mati.
3. Pada rangkaian terdapat 2 buah Arduino (Master dan Slave), button, LED, dan ground. Pada I2C, data ditransfer dalam bentuk message yang terdiri dari kondisi start, Address Frame, R/W bit, ACK/NACK bit, Data Frame 1, Data Frame 2, dan kondisi Stop. Kondisi start dimana saat pada SDA beralih dari logika high ke low sebelum SCL. Kondisi stop dimana saat pada SDA beralih dari logika low ke high sebelum SCL. R/W bit berfungsi untuk menentukan apakah master mengirim data ke slave atau meminta data dari slave. (logika 0 = mengirim data ke slave, logika 1 = meminta data dari slave). ACK/NACK bit berfungsi sebagai pemberi kabar jika data frame ataupun address frame telah diterima receiver.
7. Link Download [kembali]
Link HTML Download disini
Link Video Download disini
Link Rangkaian Download disini
Link Program Arduino Download Master Download disini
Link Program Arduino Download Slave Download disini
Tidak ada komentar:
Posting Komentar